Lidar (LiDAR, LIDAR and Lidar are all acceptable) is a remote sensing technology that lets a sensor platform quickly gather high-precision spatial data. The term Lidar often refers to the physical sensors but can also be used to refer to the data produced by the sensors or the software used to process the sensor data.
Physically, Lidar sensors work by sending out a pulse of light (usually from a laser) in a known direction and then recording the returns from that pulse before moving the mirror to a new direction and firing another pulse. The timings of the returned pulses measures the distance from the sensor which can be combined with the known direction of the pulse to identify a single point in 3D space for each measured return. In short range systems, the emitter and detector portions can be decoupled such that scans are almost constantly taking place. Figure 1 shows how such a system might work and gives one visualization for the kind of data that is returned. Different laser frequencies and detectors can be used to tune the system to be better able to image the shape of clouds, scan bottoms of riverbeds or detect fast moving objects. Recently, Lidar sensors have found a home on self-driving cars, but are also commonly used on airplanes, helicopters, drones and satellites.

Figure 1 - Lidar System Overview
Lidar software generally deals with understanding, manipulating, and transforming the 3D points found by the hardware. There are a variety of formats in use to store the data with multiple industry standards such as DEM, DSM, LAS, LAZ and XYZ (see glossary below). The simplest formats just store three offsets from a given origin for each point in the data set. More complex formats can combine many types of geo-spatial data (photos, latitudes, longitudes, polygonal region definitions, point cloud, etc.) to provide more context.
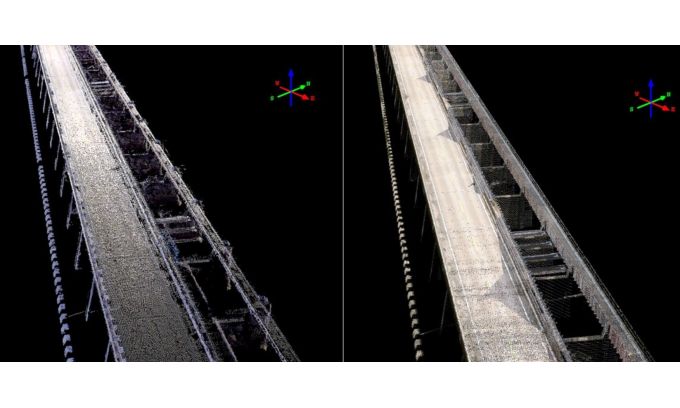
Software is needed to perform filtering on the raw point cloud data. A canonical example of this is using the same point cloud data to extract the heights and shape of the tops of the trees in a forest as well as get the underlying shape of the forest floor as seen in Figure 2.

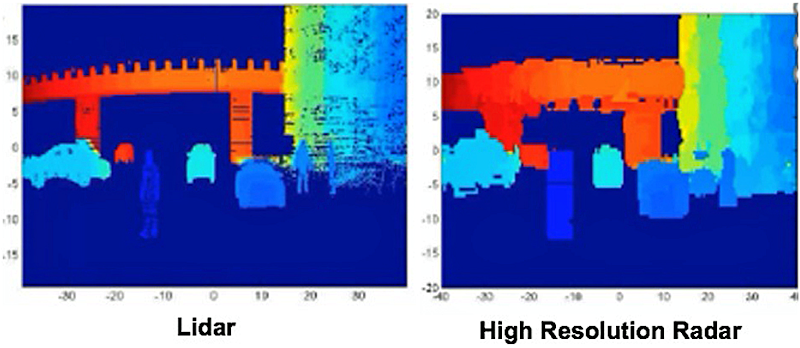
Sensor fusion refers to the art and science of combining data from multiple types of data. This is commonly done with self-driving vehicles to allow the vehicle a better understanding of the space around it. Lidar data is combined with radar returns, video images, GPS data, and other internal sensors. This data can then be used for navigation, mapping, collision avoidance, etc. A good visualization of the Lidar data generated by a self-driving car can be found on YouTube.